Robot Espaciales
Robot K10
Este mecanismo llamado K10 es para exploración Lunar, esta en prueba en ESTADOS UNIDOS, Arizona. Fue creado en 1998.

Este robot tiene 3 sensores.
1-Ultrasonico: Este sensor hace que el robot se detenga cuando se encuentra un objeto cerca a una distancia menos a 30 cm y emite un sonido, cuando no se encuentra algo cerca el robot sigue avanzando.

2-Contacto: al ser presionado este sensor hace que el robot siga avanzando.
3-Sonido: Este sensor hace que la antena gire cuando detecta ruido, cuando hay silencio la antena deje de dar vueltas y se detiene por unos segundos.
Este robot tiene motores
1-Motor de NXT: Este motor sirve para que el robot se mueva y avance.
2-Motor de RCX: Este motor se utiliza para que la antena gire.
El opportunity
Su misión fue ir a Marte, a exploración en el 2004 al 2005.
Puede sobrevivir en el invierno puede cavar para recoger muestras de la tierra de Marte.

Cuenta con los sensores:
Sensor de sonido al detectar un
sonido mayor a 30, enciende el motor B y hace que una tornamesa de vueltas.

Sensor ultrasónico hace que el mecanismo se detenga y retroceda por 2 segundos.
Robot Curiosity
Fecha del día que aterrizo:
agosto del 2012
Donde se localiza: en la base de
la montaña marciana.

Su Misión es la de explorar, recolectar rocas y toma muestras de Marte.
La mano del robot se mueve y recolecta muestras después la analiza y las guarda.
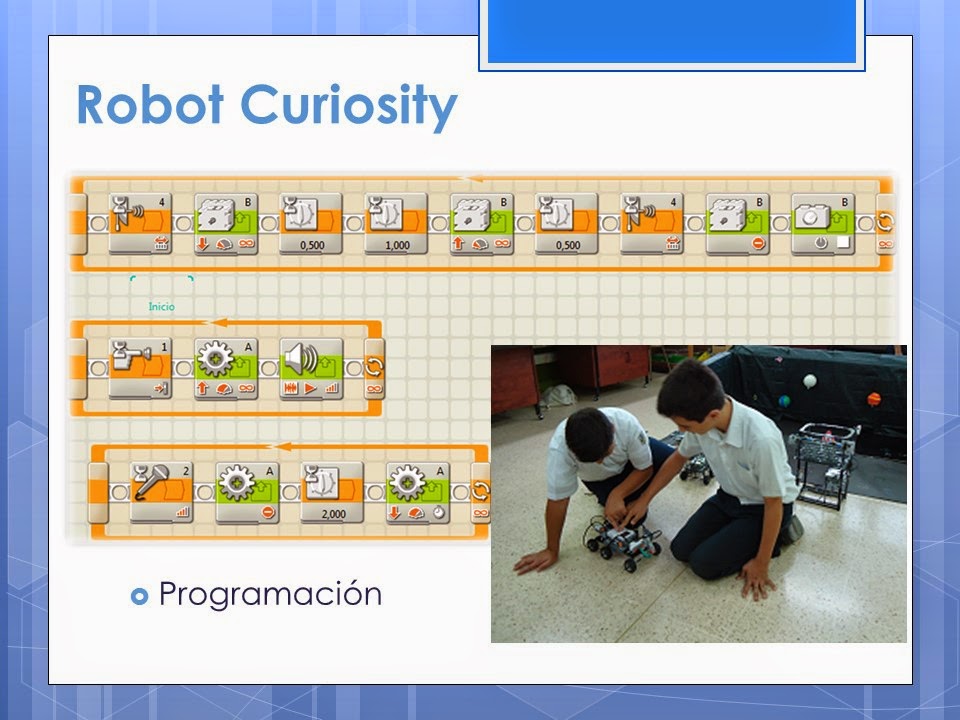
Al tocar el sensor de tacto se enciende
el motor para avanzar, emite un sonido, si el sensor de sonido detecta sonido
el mecanismo retrocede y si el sensor ultrasónico detecta un objeto cerca levanta el mecanismo que simula la mano que recolecta las muestras.
Roving Lunar
Se localiza en el Planeta Tierra,
Rusia y desorbitado en 2001.

Fue enviado a la luna para la recolección de muestras en 1983.
Utilizan el sensor de toque para que el robot avance, se detiene cuando el sensor ultrasónico detecta una distancia menor a 30 cm (un objeto cerca), asimismo con el sensor de sonido al detectar ruido activa el motor RCX en el puerto B simulando la mano que recolecta las muestras de la luna.

Robot SPIRIT
La misión
del robot es saber si en Marte hay vida y si en la tierra hay grandes masas
de hielo. La fecha en que se envió a Marte fue el 24 de enero del 2014,
finaliza la misión en marzo del 2010.

Se utiliza un motor de NXT, uno de RCX, un sensor de contacto, uno ultrasónico.
Además emplea el sensor de sonido detectar ruido activa un sonido y cuando hay silencio desactiva el sonido; con el sensor ultrasónico si no detecta ningún objeto cerca, es decir una distancia larga avanza, cuando ve algo cerca (distancia menor a 30 cm) se detiene.

El robot Philae
La misión de Philae era aterrizar con éxito sobre la superficie de un
cometa, unirse, y transmitir datos desde la superficie sobre la composición del
cometa.

El robot Philae ha estado 10 años
en el espacio (se envió en 2004 y aterrizó en el cometa en 12 de noviembre de 2014.

Se utiliza los siguientes sensores:
Emplean un sensor de sonido que al detectar ruidos a su alrededor activa
unos sonidos. Al presionar el sensor de toque activa el mecanismo gira hacia la
izquierda y luego a la derecha, representando al robot Philae cuando está
aterrizando. Con ultrasónico cuando se acerca un objeto enciende una luz titilante.
Base transportadora
Este mecanismo tiene como función
de trasportar y levantar a los astronautas para el ingreso hacia el cohete.


El sensor de toque activa el
mecanismo (acordeón) para levantar a los astronautas hacia el cohete, luego se
devuelve. Además utiliza el sensor de sonido que al detectar ruido activa una
alarma.
Video del mecanismo:
Base Espacial y Cohete
Construyeron la torre con vigas,
clavijas, entre otras piezas lego; para abrir y cerrar las puertas agregaron engranes y cremalleras,
también 2 motores RCX. Para hacer la demostración del cohete se realizó con
el mecanismo “El acordeón” y un motor
NXT.

Utilizan los siguientes sensores: un sensor de contacto , uno de sonido y el ultrasónico.
El sensor de contacto: Activa los motores de RCX
para abrir y cerrar las puertas para ingresar donde está el cohete.

El sensor ultrasónico: Activa los motores de NXT que simula el cohete, al detectar a los astronautas ingresar por la puerta, pasan unos 15 segundos y despega el cohete.
Un pequeño video:
No hay comentarios:
Publicar un comentario